- Home
- 新製品&新技術NOW, プレスリリース
- 富士通と芝浦工大・早大、量子技術でロボット制御に新手法、多関節ロボットの姿勢制御を高精度化
富士通と芝浦工大・早大、量子技術でロボット制御に新手法、多関節ロボットの姿勢制御を高精度化
- 2025/8/25 20:02
- 新製品&新技術NOW, プレスリリース
■富士通の超電導量子コンピューターで有効性を確認、計算回数を大幅削減
富士通<6702>(東証プライム)は8月25日、芝浦工業大学および早稲田大学との共同研究により、量子コンピューターを活用したロボットの姿勢制御手法を開発したと発表した。複数の関節を持つロボットの「逆運動学計算」(目標位置に到達するための関節角度の計算)を、量子技術を用いて効率的かつ高精度に解くことに成功した。この手法では、ロボットの各部品(リンク)の向きや位置を量子ビットで表現し、量子回路を用いて順運動学計算(関節角度から手先位置を求める計算)を実行する。さらに、親関節の動きが子関節に影響する構造を量子もつれで再現することで、従来の古典的手法と比較して必要な計算回数を大幅に削減し、収束速度と精度を向上させた。同研究は、理化学研究所と富士通が共同開発した64量子ビットの超伝導量子コンピューターでも有効性が確認された。
複雑な姿勢制御が求められる多関節ロボットでは、目標とする手先の位置から関節の角度を求める「逆運動学計算」が重要となる。人体の関節数と同じ17個の関節を持つ全身多関節モデルの場合、従来の計算手法では解くことが困難で、関節を近似したモデルで計算するのが一般的であった。これに対し、今回の研究で開発されたハイブリッド手法は、古典的なコンピューターと量子コンピューターを組み合わせることで、効率的な姿勢制御を実現する。富士通の量子シミュレーターを用いた検証では、従来手法に比べて少ない計算回数でも、最大43%の誤差低減を達成した。また、17個の関節を持つ全身多関節モデルの運動計算が、30分程度で実行できるという試算も得られている。
この新しい手法は、少数の量子ビットで多関節ロボットの姿勢を表現できるため、現在の開発段階の量子コンピューター環境でも実装可能である。将来的な応用として、ヒューマノイドロボットや多関節マニピュレータのリアルタイム制御、障害物回避、エネルギー最適化などが期待されている。論文は、芝浦工業大学の大谷拓也准教授、早稲田大学の高西淳夫教授、富士通の原伸之、瀧田裕、木村浩一らの名で、科学誌「Scientific Reports」に掲載された。同提携は、複雑なロボットの姿勢計算における量子技術の突破口を開くものであり、次世代ロボットの開発に大きく貢献する見通しだ。(情報提供:日本インタビュ新聞社・株式投資情報編集部)
関連記事






ピックアップ記事
-
2026/1/15
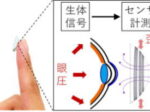
早大と山口大、眼圧測定できるスマートコンタクトレンズ開発、緑内障の早期発見へ■特殊な無線技術で高感度化、動物実験で市販測定器と高い一致 早稲田大学と山口大学の研究グループは… -
 ■2019年以来の来日、K-POP史上最多規模の単独ツアー 21世紀のポップアイコン・BTSが、…
■2019年以来の来日、K-POP史上最多規模の単独ツアー 21世紀のポップアイコン・BTSが、… -

2026/1/14
オリエンタルランド、東京ディズニーリゾート累計入園者9億人達成■開園から42年266日、2パーク合計で大台到達 オリエンタルランド<4661>(東証プライム)…