- Home
- 新製品&新技術NOW, プレスリリース
- JR東海・スズキ・PAD、リニア設備検査ロボット「Minervα」開発
JR東海・スズキ・PAD、リニア設備検査ロボット「Minervα」開発
- 2025/11/27 08:20
- 新製品&新技術NOW, プレスリリース

■山梨リニア実験線で2026年2月から検証開始
JR東海(東海旅客鉄道)<9022>(東証プライム)は11月26日、スズキ<7269>(東証プライム)、パナソニック アドバンストテクノロジー(PAD)と共同で、超電導リニアの設備外観検査を自動で行うロボット「Minervα(ミネルヴァ)」の試作機を開発したと発表した。山梨リニア実験線に点在する分岐装置や乗降設備などは、作業者が長距離を移動し、狭隘箇所で身体的負荷の高い検査作業を行う必要がある。このため、リニア中央新幹線の開業後に想定される広範囲での点検需要への対応を見据え、外観検査の自動化による業務効率化を目指して3社が協働した。
試作機の基盤には、スズキが開発中の多目的電動台車「MITRA」が鉄道業界で初めて採用され、不整地でも安定走行が可能となった。ロボットアームを備え、カメラや照明を用いて多角度から外観検査を行う構造としたほか、周囲環境認識用と障害物検知用の2種類のLiDARを搭載し、トンネル内でも位置情報を取得できる。さらに、PADの自律移動ソフトウェア「@mobi」を組み込み、自律走行、ロボットアーム制御、自動充電といった機能により外観検査を自動化した。デザイン面では、ドクターイエロー(T4編成)をモチーフとした親しみやすい外観を採用し、プロダクトデザイナー森澤有人氏が担当した。
3社は2026年2月から山梨リニア実験線で機能性検証を開始し、外観検査の精度や運用性を確認する。将来的にはリニア中央新幹線の沿線各地へロボットを展開し、点検箇所への移動時間や作業負荷の軽減を図る方針である。人手不足が見込まれる保全業務の効率化に向け、ロボット技術の活用が本格化する見通しとなった。(情報提供:日本インタビュ新聞社・株式投資情報編集部)
関連記事






ピックアップ記事
-
2026/1/15
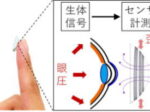
早大と山口大、眼圧測定できるスマートコンタクトレンズ開発、緑内障の早期発見へ■特殊な無線技術で高感度化、動物実験で市販測定器と高い一致 早稲田大学と山口大学の研究グループは… -
 ■2019年以来の来日、K-POP史上最多規模の単独ツアー 21世紀のポップアイコン・BTSが、…
■2019年以来の来日、K-POP史上最多規模の単独ツアー 21世紀のポップアイコン・BTSが、… -

2026/1/14
オリエンタルランド、東京ディズニーリゾート累計入園者9億人達成■開園から42年266日、2パーク合計で大台到達 オリエンタルランド<4661>(東証プライム)…